围绕“神经机制—计算模型—具身系统”的递进路径,形成从基础理论到工程实现的系统化研究布局,具体包括以下三个方向:
- 以多脑区协同的认知神经机制与计算理论为科学源头;
- 以具身数字孪生脑与认知环路脑启发算法为核心方法;
- 以类脑具身智能大模型与仿生机器人系统为验证载体。

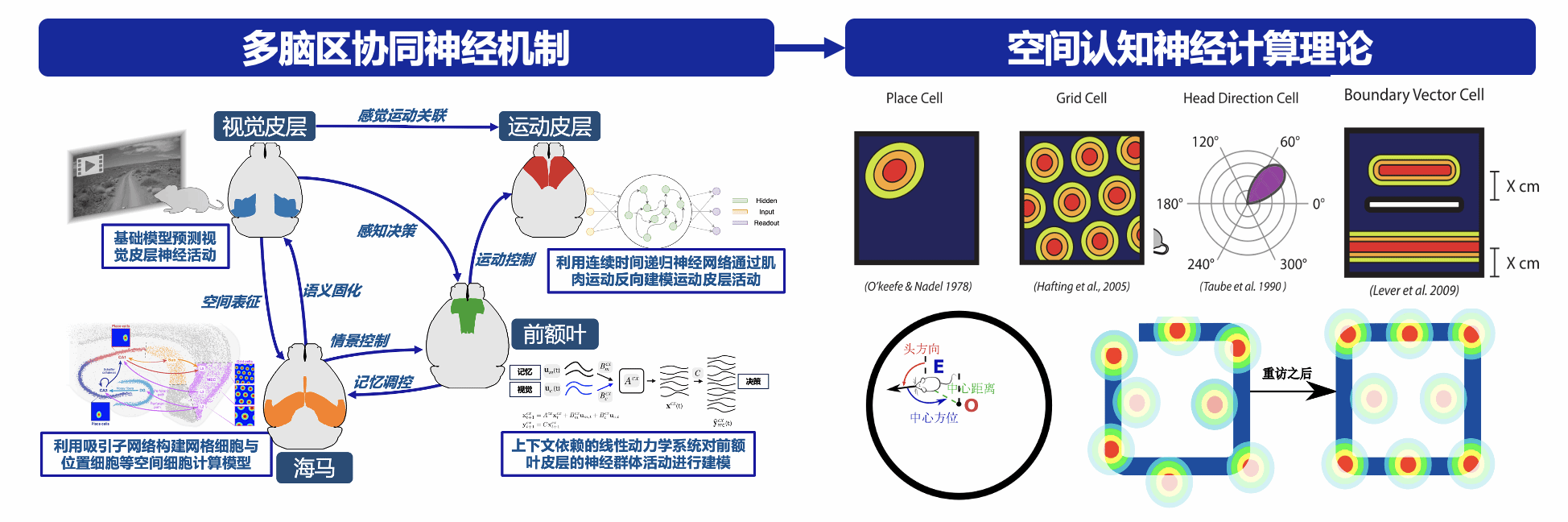
方向一:多脑区协同的认知神经机制与计算理论
围绕认知与智能行为的神经基础,研究海马—内嗅皮层等多脑区协同机制,揭示导航、记忆、学习与决策等认知功能的神经编码与动态调控规律。在此基础上发展可解释的神经动力学模型与计算理论,刻画认知表征与信息传递机制,为类脑智能系统提供理论基础与生物学依据。
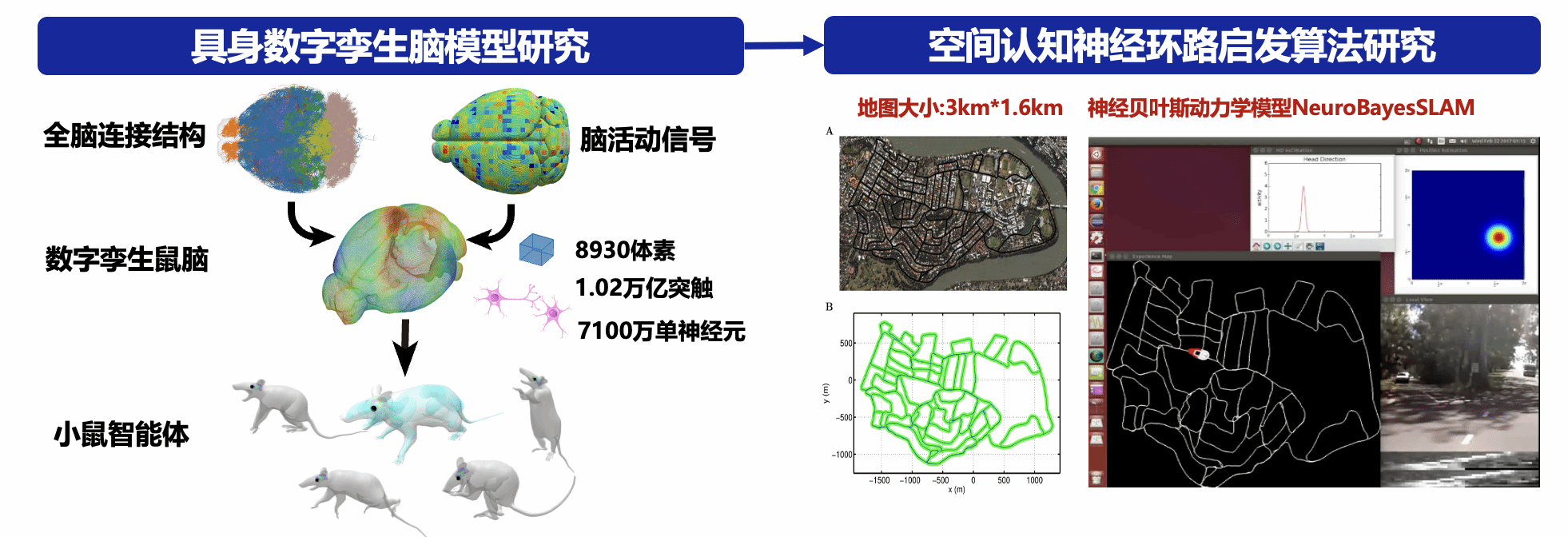
方向二、具身数字孪生脑模型与认知环路脑启发算法
面向脑—体—环境耦合,融合多模态数据与神经动力学方法,构建具身数字孪生脑模型,形成可计算、可演化的认知系统,并通过刻画其认知环路与动力学机制抽象脑启发计算模型,实现感知、认知与行为生成的统一表达,完成神经机制向智能行为的跨尺度映射与系统验证。
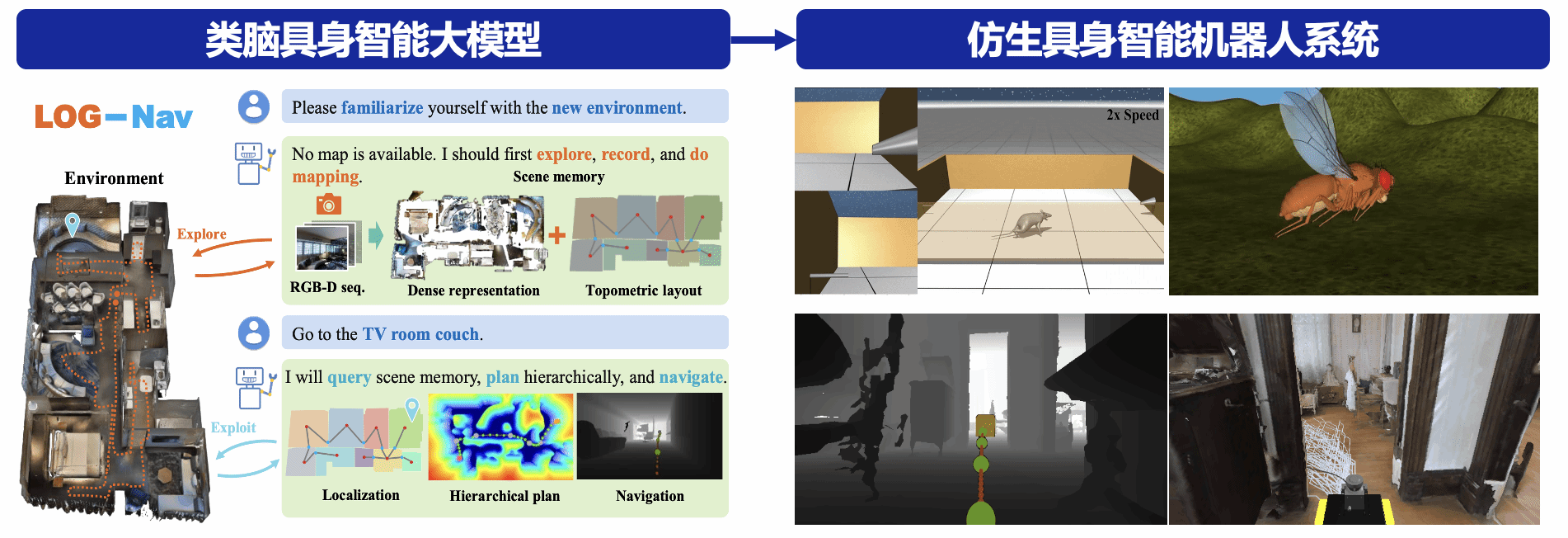
方向三:类脑具身智能大模型与仿生机器人系统
融合类脑认知机制与大模型技术,构建面向复杂环境的具身智能模型,实现感知—记忆—决策—行动一体化。在机器人平台开展系统集成与验证,形成具备自主导航、灵巧操作、高效运动与自然交互能力的仿生机器人系统,支撑复杂环境下的智能制造、生活服务与现代农业等领域。


 综合新闻
综合新闻